A continuació explicaré el que he de fer en aquest curs.
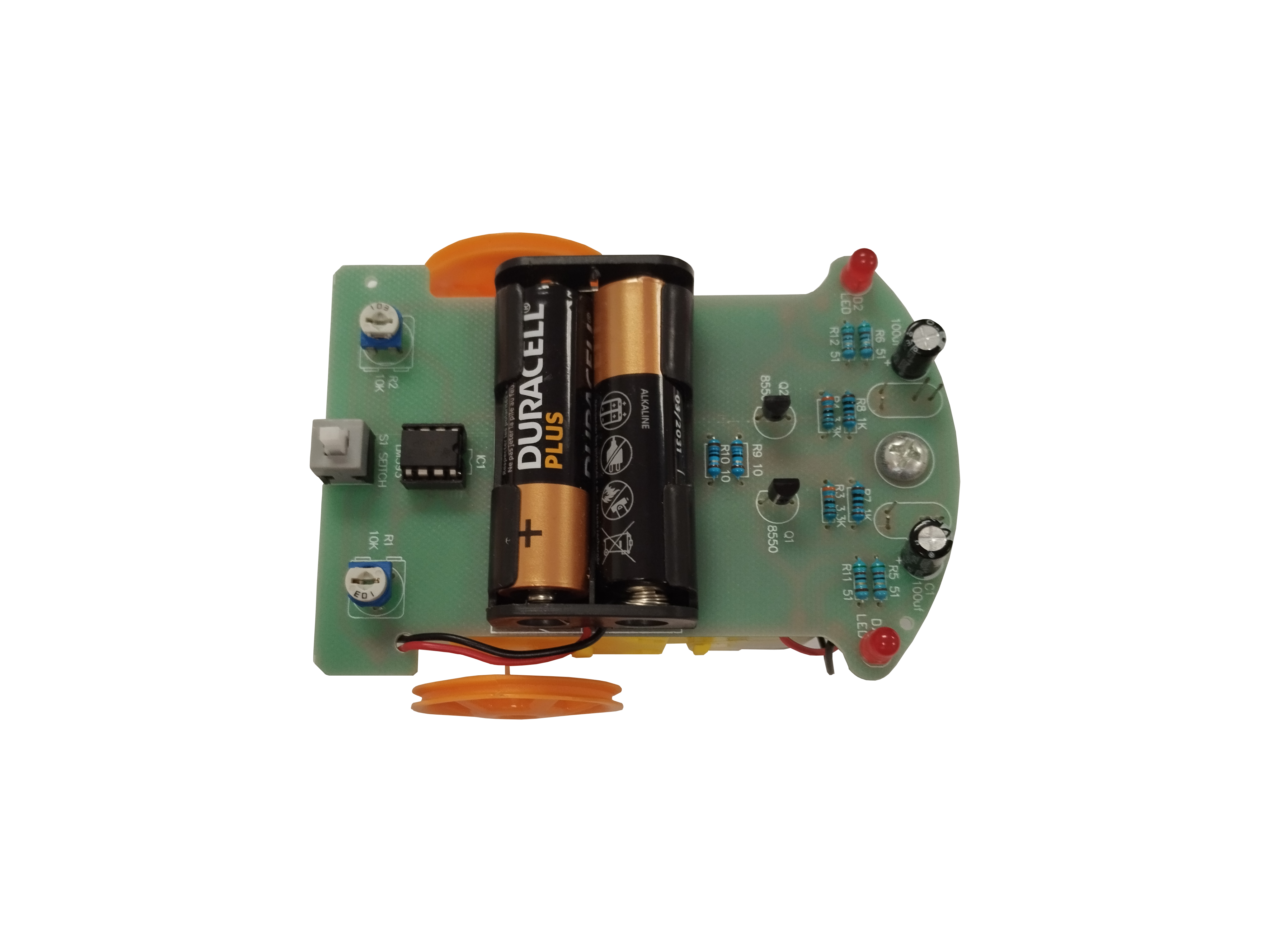
Aquí pots veure el robot seguidor de línies:
Els temes que farem seran:
Mapa d'imatge d'un robot seguidor de línies no programable amb l'objectiu d'entendre totes les parts del robot i que fan. Per això utilitzarem l'editor d'imatge no vectorial GIMP que ens donarà les coordenades, després editarem el codi que ens proporciona GIMP amb la biblioteca de JavaScript mapper.js que ens permetrà donar color a les àrees.
Circuit de F1 en el meu cas Montmeló. hauré d'utilitzar l'editor d'imatge vectorial Inkscape que permet fer corbes amb formes suaus o abruptes anomenades corbes Bézier seguint el exemple de la web del professor.
Utilitzar la impressora 3d. Es fa servir de la següent manera: primer ens assegurem que la impressora està en una posició coneguda per tal que no es mogui, després la preescalfem fins a 200 graus i 60 graus a la base. Seguidament polsem el botó bet level per a què es nivelli la base de la impressora. I, finalment l'encenem i li donem l'orde d'impressió.